Gradient flow for Blasso problem
Note: This blogpost is the next part of the previous post about numerical methods for Blasso problem: Solving Blasso problem using gradient descent method.
Let be the space of Radon measures supported on a compact set .
Blasso problem is
where , is a Hilbert space, operator is linear and weak* continuous, and the total variation norm of Radon measures.
Blasso is a non-smooth, convex optimization problem. It is an infinite-dimensional counterpart of the Lasso problem.
Under certain conditions (see Theorem 2 in Duval and Peyre), there exists an optimal measure being discrete, i.e., combination of a small number of Dirac masses:
for and .
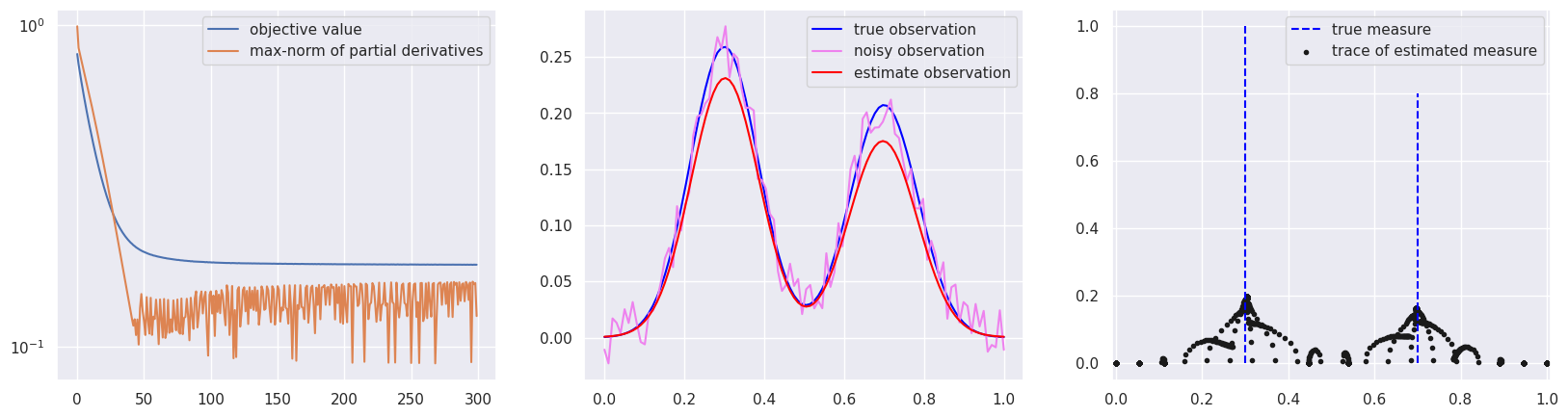
To solve this problem, the gradient flow method was proposed. Its basic idea is to approximate the unknown measure by a discrete measure with sufficiently large number () of Dirac masses and perform the simple gradient update (roughly speaking gradient flow) on the weights and for .
This blog post modifies our previous python code and obtains the following numerical result, which confirms the convergence of discrete measures (black dots in the third figure).
The python code is provided below
import torch
import matplotlib.pyplot as plt
import seaborn as sns
sns.set_theme()
def dic(x, t, w):
diff = x.reshape(-1, 1) - t.reshape(1, -1)
g = torch.pow(2, -diff**2/w**2)
norm = g.norm(p=2, dim=0)
return g/norm
def opt_min(func, point, lr=1e-2, max_iters=500, epsilon=1e-2):
point.clone()
data = {
"val": [],
"grad_max": [],
"points": []
}
for i in range(max_iters):
point.requires_grad = True
point.grad = torch.zeros(point.shape)
loss = func(point)
loss.backward()
grad = point.grad
point = point - lr * grad
# detach
loss = loss.detach()
grad = grad.detach()
point = point.detach()
# save
grad_max = grad.abs().max()
data["val"] += [loss]
data["grad_max"] += [grad_max]
data["points"] += [point.clone()]
# stop
if grad_max<epsilon:
break
return point, data
def test():
x = torch.linspace(0., 1., 100)
w =0.1
p0 = torch.tensor([0.3, 0.7])
c0 = torch.tensor([1., 0.8])
y0 = dic(x, p0, w) @ c0.reshape(-1, 1)
noise = 0.5*(torch.rand(y0.shape)-0.5)
y = y0 + 1e-1 * noise
lbd = 0.1
t = torch.linspace(0., 1., 10)
def func(point):
p, c = point
a = 0.5 * (y - dic(x, p, w) @ c.reshape(-1, 1)).norm()**2
b = lbd * c.norm(p=1)
return a+b
p = torch.linspace(0., 1., 20)
c=torch.zeros(len(p))
point = torch.cat([p, c]).reshape(2, -1)
point_est, data = opt_min(func, point,max_iters=300)
p_est, c_est = point_est
y_hat = dic(x, p_est, w) @ c_est.reshape(-1, 1)
f, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(20, 5))
ax1.plot(data["val"], label="objective value")
ax1.plot(data["grad_max"], label="max-norm of partial derivatives")
ax1.set_yscale("log")
ax1.legend()
ax2.plot(x, y0.reshape(-1), label="true observation", color="blue")
ax2.plot(x, y.reshape(-1), label="noisy observation", color="violet")
ax2.plot(x, y_hat.reshape(-1), label="estimate observation", color="red")
ax2.legend()
ax3.vlines(x=p0, ymin=0., ymax=c0, label="true measure", color="blue", ls="--")
# ax3.vlines(x=p_est, ymin=0., ymax=c_est, label="estimate measure", color="red", ls="--")
for i in range(len(data["points"])):
if i % 7 ==0:
p = data["points"][i]
if i==0:
ax3.scatter(p[0], p[1], marker=".", c="k", label="trace of estimated measure")
else:
ax3.scatter(p[0], p[1], marker=".", c="k")
ax3.set_xlim(-0.01, 1.01)
ax3.legend()
plt.show()
test()






