Knapsack Problem
1. Problem definition
Knapsack problem is defined as
Without loss of generality, we assume that is sorted, i.e. . The solution of this problem has a closed form solution.
Let be the largest index so that
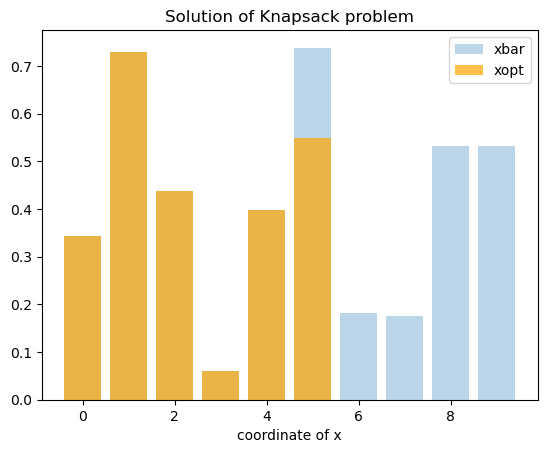
Then the optimal solution can be characterized by ,
The following figure demonstrates a solution of Knapsack problem.
2. Property of Knapsack
Let . It is clear that the Knapsack problem is feasible iff . Let be the maximum value of above Knapsack problem parameterized by . Then we have the following theorem characterizes the function
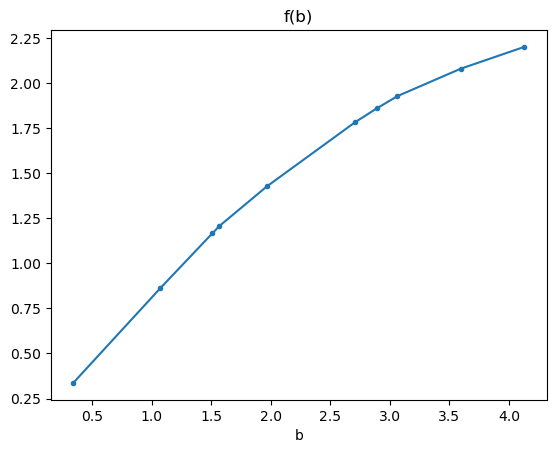
Theorem. The optimal value of knapsack problem is a piecewise linear increasing concave function of budget parameter .
Moreover, the breakpoints of are defined as above. On , the slope of is , which forms a decreasing sequence, thus is concave. The following figure demonstrates the graph of .
3. Code
# 1. solving knapsack
import numpy as np
np.random.seed(123)
n = 10
c = - np.sort(-np.random.rand(n)) # cost coefficients with decreasing order
xbar = np.random.rand(n) # bounds of x
lbd = 0.61 # parameter of b
b = lbd * xbar.sum() # budget
def knapsack(c, xbar, b):
# c is sorted in decreasing order
# b <= sum(xbar)
xopt = np.zeros_like(xbar)
gamma = 0
for i in range(n):
gamma += xbar[i]
xopt[i] = xbar[i]
if gamma >b:
gamma -= xbar[i]
xopt[i] = b - gamma
break
return xopt
xopt = knapsack(c, xbar, b)
print("opt solution is", xopt)
print("check sum(xopt) = b, result is", np.abs(xopt.sum() - b)<1e-6)
# 2. vis knapsack solution
import matplotlib.pyplot as plt
plt.bar(range(n), xbar, alpha=0.3, label="xbar")
plt.bar(range(n), xopt, alpha=0.7, color="orange", label="xopt")
plt.legend()
plt.xlabel("coordinate of x")
plt.title("Solution of Knapsack problem")
plt.show()
# 3. plot knapsack function
gamma_values = []
S = 0
for i in range(n):
S += xbar[i]
gamma_values += [S]
def max_knapsack(c, xbar, b):
xopt = knapsack(c, xbar, b)
max_value = np.dot(c, xopt)
return max_value
f_values = [max_knapsack(c, xbar, b) for b in gamma_values]
plt.plot(gamma_values, f_values, marker=".")
plt.title("f(b)")
plt.xlabel("b")
plt.show()






